Robotics and image processing in production
The content on this page was translated automatically.

In the consecutive project "Robotics and Image Processing in Production" offered by the Department of Measurement and Control Engineering, you can gain initial experience with these pioneering technologies in the field of service robots and image processing. You will work together as a project team to solve problems in the format of a Robothon.
Service robots and image processing are leading to a sustainable transformation of the manufacturing industry as well as other sectors such as healthcare, agriculture, household and aerospace. Applications of service robots include assisting workers by handing or holding parts during assembly, the automated inspection of production facilities and infrastructure or the automated, flexible transportation of goods in factories or hospitals.

What our project participants can expect
- Robotics: Designing, programming and testing the use of cobots and autonomous mobile robots for production tasks
- Image processing: Automating object recognition tasks using cameras and software systems
- Programming: getting to know various programming languages and environments such as Blocky, OpenCV, Python and ROS
- Digitalization, simulation and optimization of production processes: Using digital twins of the robots and their environment to test and optimize robot programs and functions
- Solving complex problems: Automating production tasks and designing human-robot and robot-robot cooperation for this purpose

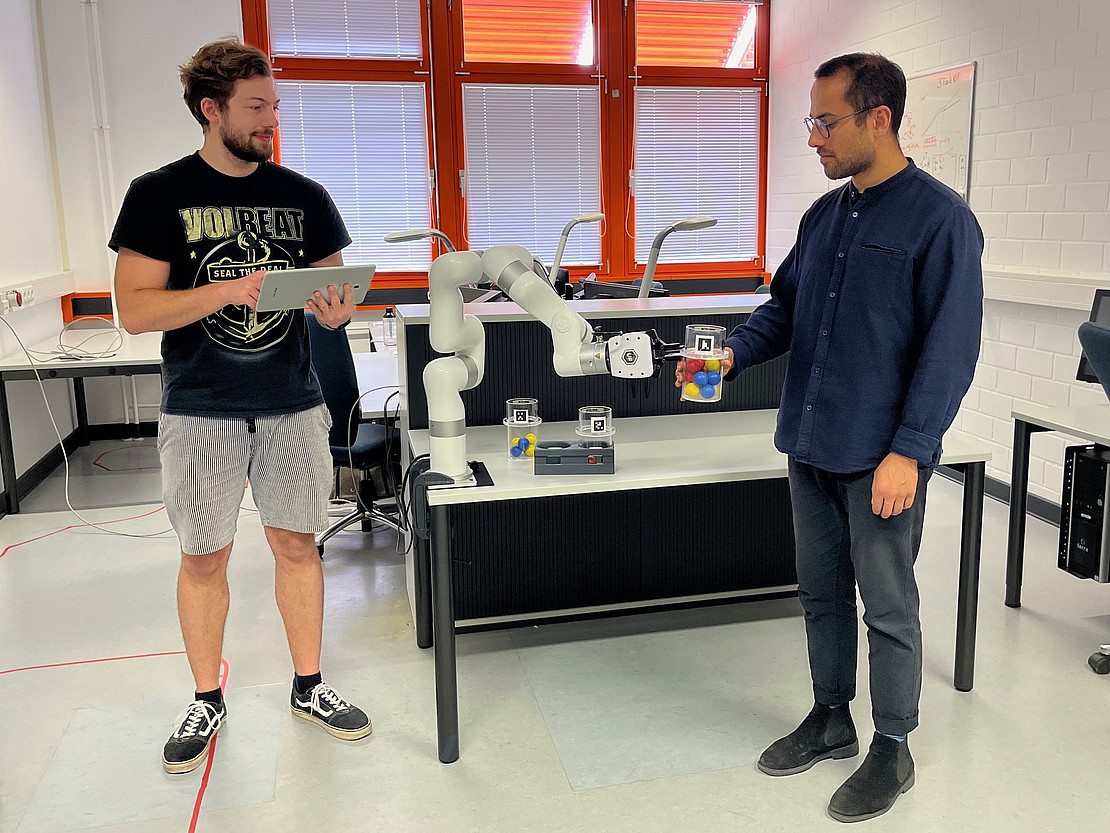
In Project I "Programming a cobot", you will program a cobot (cooperative robot) to solve production-related problems such as material handling or assembly. You will learn about graphical programming as well as programming with Python. You will test your programs in the simulation and then on a real 6-axis cobot (UFACTORY xArm 6). You will learn the differences between solving a problem using teach-in and programming.
Your creativity is required when defining the problems, whereby sample tasks are given. In the latter, on the one hand, the rearrangement or sorting of different workpieces is planned and, on the other hand, the handing of a workpiece for assembly. Various gripper systems are used for this. Finally, you evaluate the cobot with regard to various properties such as Cooperative completion of tasks with humans, work safety, flexibility of use and thus programming, and performance of task completion (precision and speed).
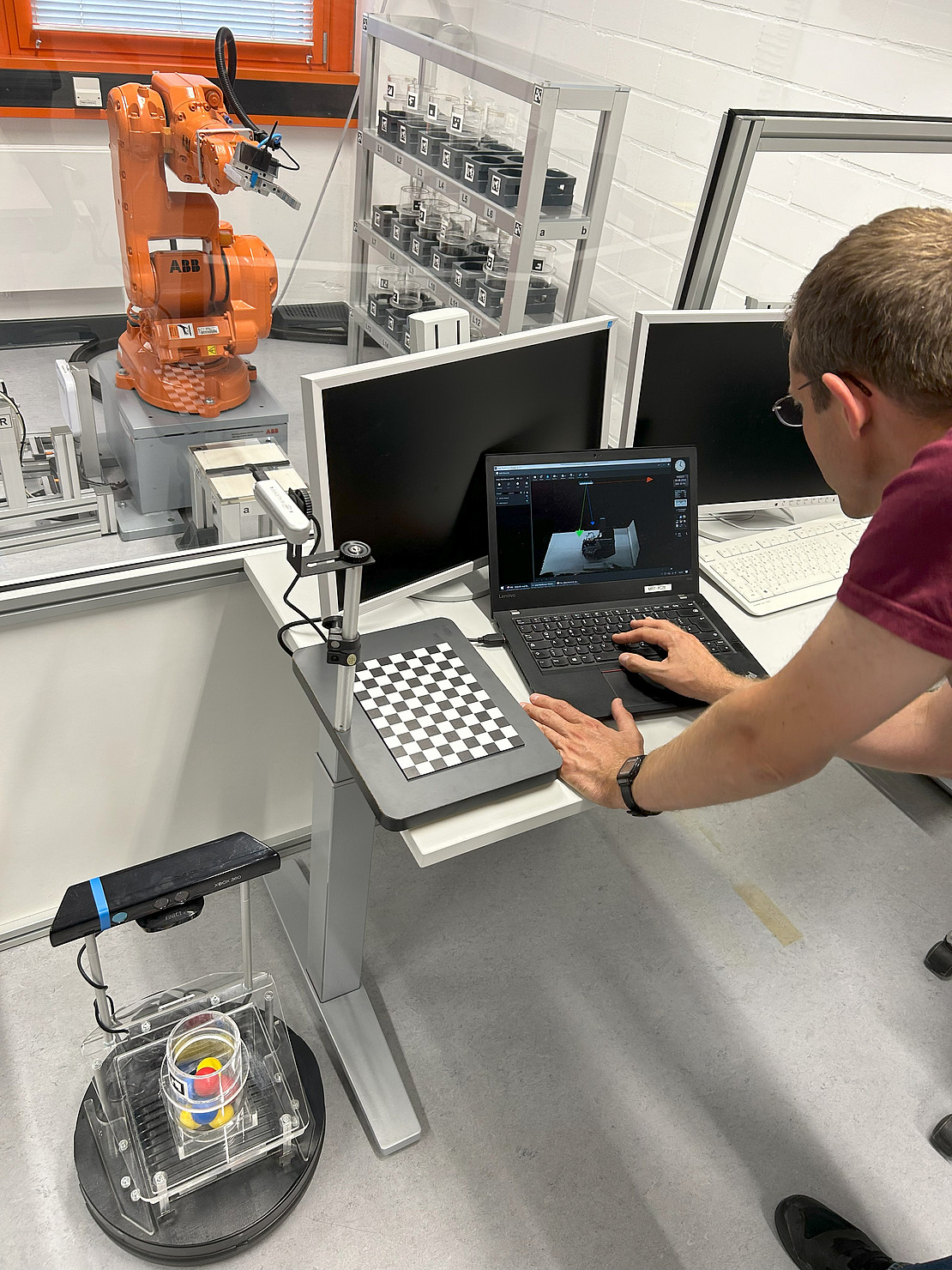
If robots are to interact with the environment or people, they need sensors. Humans know from their own experience that sight is probably the most powerful of all senses. However, teaching machines to see is a very complex task. Therefore, in this project 2 we will approach machine vision step by step. What should the robot (or robots) do? Which camera(s) do we need? What does the software side look like? We don't have to start from scratch here, but can use Python libraries such as OpenCV, scikit-image or Open3D. ChatGPT can help, but the tasks are complex and the devil is in the detail. Our project 2 is designed in such a way that the "mandatory goal" can be easily achieved or the "mandatory task" can be easily completed. Afterwards, there is time for creativity and perhaps spectacular additional features.
In Project III "Multi-robot systems with image processing in production applications", you will acquire skills in the integration of cobots, image processing systems and mobile robots to solve production tasks. The results from projects I and II will be used and combined with autonomous mobile robots in the department's award-winning µPlant model factory. You will acquire additional knowledge in the field of navigation of mobile systems as well as in programming with the Robot Operating System (ROS). You will test your programs in the µPlant model factory and gain your own impression of the current opportunities and limitations of digital twins in production applications.

We recommend consecutive completion of the three projects. Students who are interested in participating in all three projects will be given priority when allocating places. Nevertheless, it is also possible to take only individual project modules. There are 8 places per project / semester. Both mechanical engineering students and +MINT students are welcome.
If you have any questions, please contact the exercise and laboratory supervisor Miguel David Méndez Bohórquez (Department of Measurement and Control Engineering, miguel.mendez@mrt.uni-kassel.de, Tel. +49 561 804-1826, R1512, Mö7).