Robotik und Bildverarbeitung in der Produktion

Im konsekutiven Projektangebot „Robotik und Bildverarbeitung in der Produktion“ des Fachgebiets Mess- und Regelungstechnik können Sie im Bereich von Service-Robotern und Bildverarbeitung erste Erfahrungen mit diesen zukunftsweisenden Technologien erwerben. Dabei arbeiten Sie gemeinsam als Projektteam an der Problemlösung im Format eines Robothons.
Service-Roboter und Bildverarbeitung führen zu einer nachhaltigen Transformation der produzierenden Industrie sowie von weiteren Bereichen wie Gesundheitswesen, Landwirtschaft, Haushalt oder Raumfahrt. Anwendungen von Service-Robotern sind beispielsweise die Assistenz von Werkern durch das Anreichen oder Halten von Teilen bei der Montage, die automatisierte Inspektion von Produktionsanlagen und Infrastruktur oder der automatisierte flexible Warentransport in Fabriken oder Krankenhäusern.

Das erwartet unsere Projektteilnehmenden
- Robotik: Konzipieren, Programmieren und Testen des Einsatzes von Cobots und autonomen mobilen Robotern für Aufgaben in der Produktion
- Bildverarbeitung: Automatisieren von Objekterkennungsaufgaben mittels Kamera und Softwaresystemen
- Programmierung: Kennenlernen verschiedener Programmiersprachen und -umgebungen wie Blocky, OpenCV, Python und ROS
- Digitalisierung, Simulation und Optimierung von Produktionsabläufen: Verwendung digitaler Zwillinge der Roboter und ihrer Umgebung, um Programme und Funktionen der Roboter zu testen und zu optimieren
- Lösen komplexer Probleme: Automatisierung von Produktionsaufgaben und dazu Konzipierung von Mensch-Roboter- sowie Roboter-Roboter-Kooperation

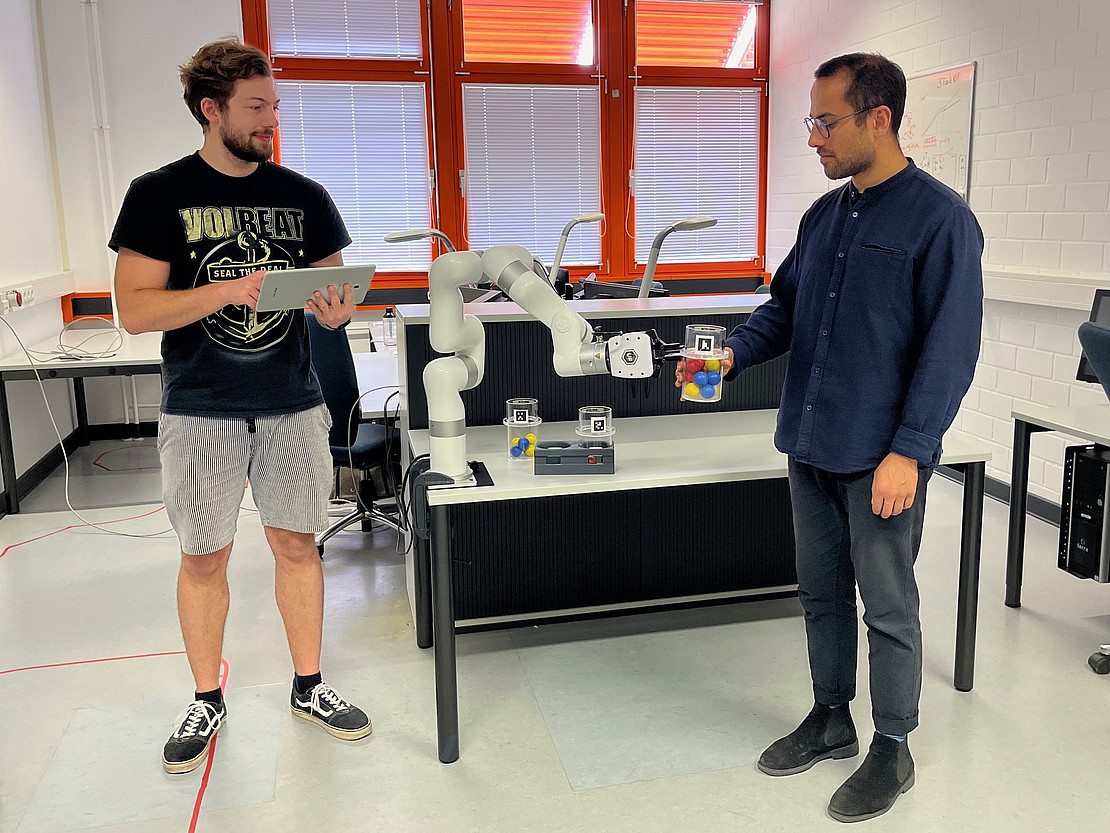
Im Projekt I „Programmierung eines Cobots“ programmieren Sie einen Cobot (cooperative robot), um produktionstechnische Problemstellungen wie Materialhandhabung oder Montage zu lösen. Dabei lernen Sie grafisches Programmieren wie auch die Programmierung mit Python kennen. Ihre Programme testen Sie in der Simulation und anschließend an einem echten 6-achsigen Cobot (UFACTORY xArm 6). Sie erfahren die Unterschiede einer Problemlösung mittels Teach-In und Programmierung.
Ihre Kreativität ist bei der Definition der Problemstellungen gefragt, wobei Musteraufgaben vorgegeben werden. Bei Letzteren ist einerseits die Umlagerung oder Sortierung verschiedener Werkstücke sowie andererseits das Anreichen eines Werkstücks für die Montage geplant. Dabei finden verschiedene Greifsysteme Einsatz. Abschließend bewerten Sie den Cobot hinsichtlich verschiedener Eigenschaften wie bspw.: Kooperative Erledigung von Aufgaben mit dem Menschen, Arbeitssicherheit, Flexibilität des Einsatzes und damit der Programmierung sowie Performance der Aufgabenerledigung (Präzision und Geschwindigkeit).
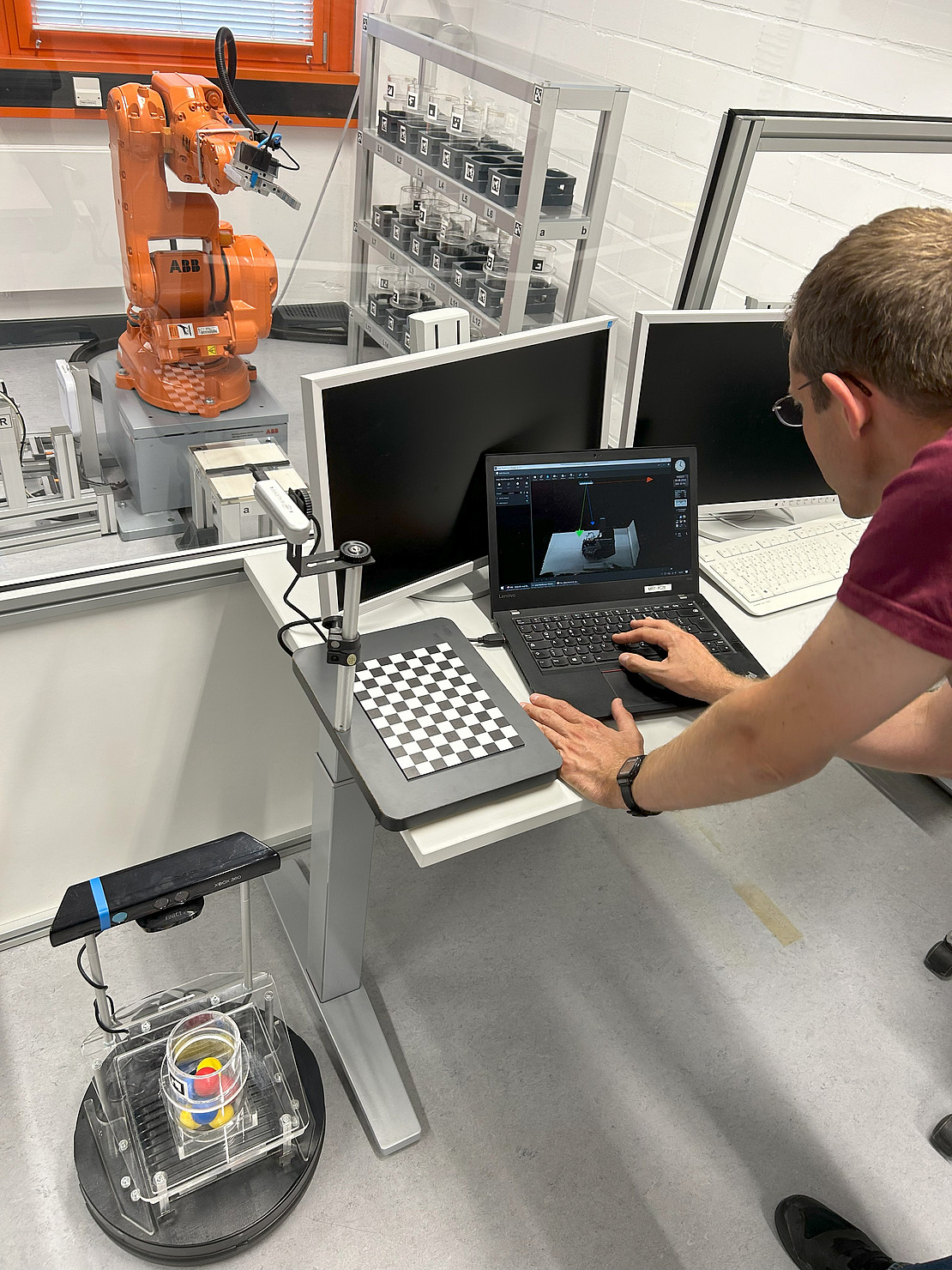
Sollen Roboter mit der Umgebung oder Menschen interagieren, benötigen sie Sensoren. Menschen kennen aus eigener Erfahrung, dass das Sehen wahrscheinlich der mächtigste aller Sinne ist. Maschinen das Sehen beizubringen, ist jedoch eine sehr komplexe Aufgabe. Daher werden wir uns in diesem Projekt 2 Schritt für Schritt an das maschinelle Sehen herantasten. Was soll der (oder sollen die) Roboter machen? Welche Kamera(s) brauchen wir dafür? Wie sieht die Software-Seite aus? Hier müssen wir nicht bei null starten, sondern können Python-Bibliotheken wie z. B. OpenCV, scikit-image oder Open3D nutzen. ChatGPT kann helfen, aber die Aufgaben sind komplex und der Teufel steckt im Detail. Unser Projekt 2 ist so vorgesehen, dass das „Pflichtziel“ gut erreicht bzw. die „Pflichtaufgabe“ gut erledigt werden kann. Im Anschluss bleibt Zeit für Kreativität und vielleicht spektakuläre Zusatzfeatures.
Im Projekt III „Multi-Robotersysteme mit Bildverarbeitung im Produktionseinsatz“ erwerben Sie Fähigkeiten in der Integration von Cobots, Bildverarbeitungssystemen und mobilen Robotern zur Lösung von Produktionsaufgaben. Dazu werden die Ergebnisse aus Projekt I und II genutzt und mit autonomen mobilen Robotern in der prämierten Modellfabrik µPlant des Fachgebiets zusammengeführt. Sie erwerben Zusatzkenntnisse im Bereich der Navigation mobiler Systeme wie auch in der Programmierung mit dem Robot Operating System (ROS). Sie testen Ihre Programme in der Modellfabrik µPlant und erhalten so einen eigenen Eindruck der aktuellen Chancen und Grenzen digitaler Zwillinge in Produktionsanwendungen.

Wir empfehlen ein konsekutives Durchlaufen der drei Projekte. Studierende mit Interesse an einer Gesamtteilnahme werden bevorzugt bei der Platzvergabe berücksichtigt. Nichtsdestotrotz ist es auch möglich, nur einzelne Projektmodule zu belegen. Es gibt 8 Plätze pro Projekt / Semester. Sowohl Maschinenbaustudierende als auch +MINT-Studierende sind willkommen.
Bei Fragen wenden Sie sich bitte an den Übungs- und Laborleiter Miguel David Méndez Bohórquez(Fachgebiet Mess- und Regelungstechnik, miguel.mendez@mrt.uni-kassel.de, Tel. +49 561 804-1826, R1512, Mö7).